3D mapping of VIVES campus with ROS
Mapping of the environment in the domain of autonomous driving is crucial. That is why we equipped our custom golfcart with a LIDAR (Puck – VLP16) sensor and a 3D camera (Realsense – d435i).

Golfcart with LIDAR 
Realsense d435i camera 
Nuvo computer
The presented mapping is solely done with 16-layer LIDAR. The computing of the mapping is been done with the Nuvo-7258 VTC. We’re running Ubuntu 18.04 on the computer and use ROS Melodic with several ROS packages to creating the mapping:
- Velodyne package: Reads the LIDAR sensor values using TCP connection
- Realsense package: Reads the Depth camera values using USB connection
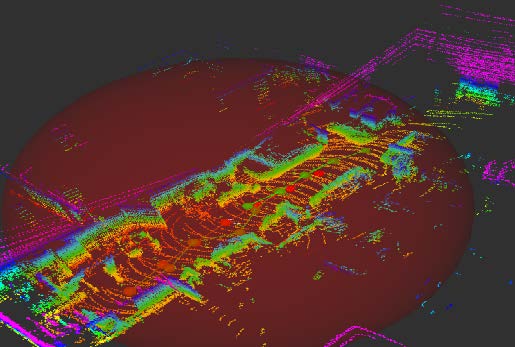
- hdl_graph_slam: Creates a 3D map based on the LIDAR data
hdl_graph_slam is an open source ROS package for real-time 6DOF SLAM using a 3D LIDAR. It is based on 3D Graph SLAM with NDT (Normal Distribution Transform) scan matching-based odometry estimation and loop detection. It also supports several graph constraints, such as GPS, IMU acceleration (gravity vector), IMU orientation (magnetic sensor), and floor plane (detected in a point cloud). For this demo no extra constraints were used. In the future, the GPS-RTK and IMU info will be added.